Люди стали изобретать первых роботов уже в середине прошлого века. Конечно, первые громоздкие разработки лишь отдаленно напоминали современные
Люди стали изобретать первых роботов уже в середине прошлого века. Конечно, первые громоздкие разработки лишь отдаленно напоминали современные, однако только благодаря их появлению наука смогла продвинуться в изучении и конструировании робототехники. Современный этап развития цивилизации может предложить миллионы модификаций автоматических устройств, давайте познакомимся с самыми известными из них.
AsimoAsimo - это японский робот, созданный корпорацией Honda. Первоначальные технические разработки проводились организацией с начала 80-х годов. Готовый продукт в виде робота Asimo был презентовал публике в начале нового тысячелетия. Он стал одним из самых обсуждаемых проектов XXI века.
В данный момент японские разработчики продолжают модернизировать устройство. Asimo, собранный в 2014 году, представляет собой робота, имеющего высоту 1,5 метра и вес 50 кг. Автоматическое устройство способно самостоятельно маневрировать в пространстве, избегать преграды, выполнять действия в рамках своей программы, например, приносить чай по просьбе человека.
VGo
 Роботизированное устройство телеприсутствия VGo управляется при помощи сети Wi-Fi. Робот может передвигаться, говорить, слышать и видеть окружающие его предметы. Пользователь может подключить к системе устройства и использовать его в качестве своеобразной камеры.
Роботизированное устройство телеприсутствия VGo управляется при помощи сети Wi-Fi. Робот может передвигаться, говорить, слышать и видеть окружающие его предметы. Пользователь может подключить к системе устройства и использовать его в качестве своеобразной камеры.
Подобная разработка создана для людей с ограниченными возможностями, которые не могут посещать определенные места. Например, ребенок-инвалид может видеть свой школьный класс, находясь при этом дома. Он сможет получать задания и следить за уроками посредством робота VGo.
Boston Dynamics
Данный робот был представлен в 2005 году. BigDog – это четырехногое устройство, которое способно преодолевать значительные расстояния. Длина модели BigDog составляет 1,5 метра, высота достигает 1 метра. Вес такого робота равен 110 кг. С помощью него человек может транспортировать грузы весом до 150 кг, минимальная скорость движения робота составит 6 км/ч.
Roboy
 Сотрудники университета Цюриха создали Roboy. Данный экспонат имеет движимые сухожилия, поэтому его жесты напоминают человеческие. Конструкция Roboy имеет мягкую поверхность, можно ощутить отдельные суставы. Робот умеет выражать разные эмоции. Считается, что он стал бы хорошим помощником для одиноких пожилых людей, лишенных внимания, заботы и ухода.
Сотрудники университета Цюриха создали Roboy. Данный экспонат имеет движимые сухожилия, поэтому его жесты напоминают человеческие. Конструкция Roboy имеет мягкую поверхность, можно ощутить отдельные суставы. Робот умеет выражать разные эмоции. Считается, что он стал бы хорошим помощником для одиноких пожилых людей, лишенных внимания, заботы и ухода.
Kuratas
![]() Это гигантский робот, имеющий высоту 4 метра. Вес устройства достигает 4,5 тонн. Он подразумевает наличие водителя, который управляет машиной из кабинки. Существует возможность руководить действиями гиганта на расстоянии с помощью дистанционной панели. Максимальная скорость передвижения робота Kuratas достигает 10 км/ч.
Это гигантский робот, имеющий высоту 4 метра. Вес устройства достигает 4,5 тонн. Он подразумевает наличие водителя, который управляет машиной из кабинки. Существует возможность руководить действиями гиганта на расстоянии с помощью дистанционной панели. Максимальная скорость передвижения робота Kuratas достигает 10 км/ч.
Создателем устройства выступил японский художник Когоро Курата, который спроектировал его на основе дизайна из аниме. Робототехник Ватару Йошизаки дополнил конструкцию. Стоимость робота – 1,3 миллиона долларов.
iCub
Итальянские специалисты разработали робота-гуманоида под названием iCub, внешний вид которого практически полностью повторяет строение человеческого тела. Устройство откликается, когда его зовут по имени. Оно способно идентифицировать знакомых людей, запоминать названия и свойства неодушевленных предметов.

Автоматическое устройство iCub может ориентироваться в пространстве и находить выход из сложных лабиринтов. Его научили стрелять из лука с идеальной точностью.
Что это?
Это статья об индустриальном применении робототехники. Применение роботов в промышленности началось, по историческим меркам, не так давно - чуть больше, чем полвека назад, но сейчас уже мало какое производство можно представить себе без автоматических линий, без стальных манипуляторов и зорких стеклянных зрачков роботов - эти железные ребята прочно вошли в большинство производственных процессов и уходить не собираются.Несмотря на такое обширное, почти повсеместное распространение роботов, лишь специалисты в полной мере представляют себе весь спектр их возможностей. В этой статье мы приоткроем дверь в мир промышленной робототехники для широкого круга читателей: опишем некоторые разновидности производственных роботов и сферы их применения. Нельзя объять необъятное в одной статье, но, если читателям будет интересно, мы обязательно продолжим.
Так какие они бывают - роботы?
Есть несколько классификаций промышленных роботов: по типу управления, по степени мобильности, по области применения и специфике совершаемых операций.
По типу управления:
Управляемые роботы: требуют, чтобы каждым их движением управлял оператор. В силу узости областей применения распространены мало. Да и не совсем роботы.
Автоматы и полуавтономные роботы: действуют строго по заданной программе, зачастую не имеют сенсоров и не способны корректировать свои действия, не могут обойтись без участия рабочего.
Автономные: могут совершать запрограммированный цикл действий без участия человека, согласно заданным алгоритмам и корректируя свои действия по мере необходимости. Такие роботы способны полностью перекрыть поле деятельности на своем участке конвейера, без привлечения живой рабсилы.
По функциям и сфере применения:
Роботы разделяются по назначению и исполняемым функциям, вот лишь некоторые из них: промышленные роботы бывают универсальные, сварочные, машиностроительные, режущие, комплектовочные, сборочные, упаковочные, складские, малярные.
Это далеко не полный перечень: количество всевозможных вариантов постоянно растет и все перечислить невозможно в рамках одной статьи. Можно лишь с уверенностью сказать о том, что вряд ли найдется такая область человеческой деятельности, где роботы не смогли бы сделать труд человека более творческим, взяв всю монотонную и опасную часть работы на себя.
Другие методы классификации
У каждой энциклопедии, каждого справочника и каждого производителя своя классификация и типология роботов. Что и не удивительно - зачастую она определяется сугубо специфическими нуждами и частным подходом того, кто её составляет.
Помешает ли это нам рассмотреть некоторые образцы и понять - что же они умеют? Нет. Начнем.
Рассмотрим образцы
Среди промышленных роботов широко известна продукция таких фирм, как Kuka, Fanuc, Universal Robots, некоторые образцы которых мы рассмотрим чуть ниже.
Очень интересным представляется подход компании Stratasys, которая создала промышленный аппарат нового типа - гибрид робота и 3D-принтера.Конечно, любой 3D-принтер обладает признаками робота, но тут - это совершенно традиционной формы роботизированный манипулятор, имеющий в том числе и функцию FDM-печати. Stratasys Infinite-Build 3D Demonstrator предназначен, прежде всего, для авиационного и космического производства, в котором так важна его способность производить печать на вертикальных поверхностях неограниченной площади, в соответствии с концепцией “infinite-build” - “бесконечное построение”. С работой над проектом связаны такие монстры, как аэрокосмический гигант Boeing и автоконцерн Ford, которые предоставили Stratasys спецификации по необходимым характеристикам получаемых изделий.Восьмиосевой механизм манипулятора, обилие специально разработанных композитных материалов для печати, традиционно высокое качество изготовления - все говорит нам о том, что у этого аппарата и его потомков большое будущее. 3D Systems - Figure 4
Figure 4 компании 3D Systems - модульная робототехническаяя система для автоматизации стереолитографической 3D-печати, ни больше, ни меньше.
Это целый автоматический комплекс, который способен производить новые изделия каждые несколько минут - в отличие от нескольких часов на обычных SLS-принтерах.
Кроме того, в цикл уже включены и такие этапы, как промывка, отделение поддержек и дозасветка, а не только первичная экспозиция. Все это Figure 4 делает сам, без вмешательства оператора в процесс работы.Благодаря модульности, на основе Figure 4 можно создать достаточно крупные автоматические линии, используя стандартные компоненты.
Этот комплекс был представлен общественности в этом году, на выставке The International Dental Show в Кёльне, как и новый 3D-принтер ProJet CJP 260Plus - полноцветный 3D-принтер предназначенный для анатомического моделирования медицинских изделий и быстрого прототипирования любых промышленных образцов.Принтер также роботизирован - снабжен системой автоматической загрузки, удаления и переработки печатного порошка.Можно с уверенностью сказать, что комплексный подход к 3D-печати - часть производственной культуры будущего. Он даст радикально новое сочетание скорости, точности, удобства и снижения себестоимости изделий.
Carbon - Carbon SpeedCell
Carbon SpeedCell - технологическое решение от компании Carbon, которое включает в себя новый 3D-принтер The M2, работающий по технологии CLIP, и финишинговый аппарат для стереолитографических распечаток Smart Part Washer.
CLIP - технология бесслойной стереолитографической печати, обеспечивающая скорость от 25 до 100 раз быстрее обычной SLS и новый уровень качества поверхности.Система CLIP (Continuous Liquid Interface Production) позволяет получить невозможные ранее формы изделий требующие минимальной постобработки. Точных характеристик аппаратного комплекса производитель пока не предоставил, но сам подход уже радует - это почти готовое решение для любой мастерской, в которой требуется стереолитографическая печать.
DMG MORI - LASERTEC 65 3D
Аппарат сочетающий в себе несколько разных подходов к обработке деталей: это и классический фрезерный станок с программным управлением - пятиосевой и весьма точный, и лазерный режущий инструмент с теми же степенями свободы, и печатающий металлом 3D-принтер с технологией лазерного напыления. Сложно представить себе операцию, которую не смог бы произвести этот станок с металлической деталью. Гибридный подход: фрезеровка заготовки, наплавление недостающих деталей или печать с нуля и чистовая обработка - все операции могут произведены с деталью за один подход, в рамках одной заданной программы, без прерывания технологического цикла. Размер обрабатываемой и/или печатаемой детали составляет до 600 на 400 мм, а вес может быть до 600 кг.Такое МФУ для работы по металлу уже многое изменило в культуре производства штучных и мелкосерийных изделий, а в ближайшее время подобный подход может распространиться и на серийное производство.
EOS - Additive Manufacturing
Компания EOS создала манипуляторы, которые способны производить различные операции, где требуется захват и перемещение детали. Разработки EOS в этой области основываются на наблюдениях за поведением животных, в частности - этот манипулятор создан по примеру хобота слона.Такой робот-манипулятор может быть использован во множестве промышленных операций, как то: в транспортировке и упаковке, в перемещении деталей из одной рабочей зоны в другую, например - из 3D-принтера в камеру пост-обработки, чтобы исключить участие человека на этом этапе.
Вот так он устроен:Также компания спонсирует и представляет проект Roboy - это мобильный гуманоидный робот, который способен выполнять любые движения свойственные человеку и служить помощником на производстве.
Concept Laser и Swisslog - M Line Factory
Известный производитель печатающих металлом 3D-принтеров, Concept Laser заключил соглашение с компанией Swisslog, их общий проект - M Line Factory, это система перемещения металлических 3D-печатных деталей между станками Concept Laser с помощью роботов Swisslog.Компании продолжают совершенствование аппаратных комплексов для 3D-печати металлом. Роботизированные составляющие этих машин способны провести деталь через весь цикл - от загрузки проекта в память, до выхода готового изделия на склад, - без необходимости вмешательства оператора.
Additive Industries - The MetalFAB1 Единственная в своем роде установка - единая система для печати, транспортировки из рабочей камеры и хранения готовых деталей. Фактически - готовый цех металлической 3D-печати в одном корпусе.Существуют роботы, которые способны выполнять функции сварочных и фрезерных станков c программным управлением.А также такие, которые обслуживают традиционные фрезерные ЧПУ-станки, увеличивая их производительность.Вот так с этим справляется упомянутый выше Sawyer:Выводы:
Роботы в современной промышленности везде. Они в любом цеху и в любой области производства. И это нормально: роботы экономят деньги работодателей, а рабочих спасают от вредной и монотонно-отупляющей работы; роботы работают круглосуточно и безостановочно; роботы намного точнее живых рабочих - они не устают, у них не “замыливается глаз”, их сенсоры и системы позиционирования способны сохранять точность до сотых долей миллиметра.
Пока мы видим их еще не везде - многие производственные процессы скрыты от рядового пользователя, да и не особо интересны обычно, - но совсем скоро невозможно будет не замечать того, что подавляющая часть всех материальных благ производится умными машинами.
Хотите больше интересных новостей из мира 3D-технологий?
Роботы. Пока еще это экзотика, но тем не менее, они все увереннее входят в нашу жизнь. Три закона роботехники Айзека Айзимова скоро перестанут быть только развлекательной литературой. Роботы – существа, которые одновременно завораживают и пугают своей человечностью и одновременно машинностью. Производство роботов развивается постоянно. Посмотрите на десятку самых интересных экземпляров на сегодняшний день.
ASIMO: Робот-гуманоид

ASIMO – это робот-гуманоид, созданный компанией Хонда. Ростом в 130 сантиметров и весом в 54 килограмма, робот похож на маленького астронавта, который несет рюкзак. Он умеет ходить на двух ногах, копируя человеческую походку скоростью в 6 км/ч. ASIMO был создан в Японии в «Центре исследований и развития» Хонды. Эта последняя модель в серии, а всего их одиннадцать, первый робот был создан в 1986 году.
Официально имя робота – это сокращение от "Advanced Step in Innovative MObility", то есть буквально «Продвинутый шаг в передовой мобильности».в 2002 году существовало 20 роботов ASIMO. Каждый стоит миллион долларов за производство, и некоторые экземпляры можно взять напрокат за 150 тысяч долларов в месяц.
Распознавание движущихся объектов
Используя зрительную информацию, которую собирает вмонтированная в голову робота видеокамера, ASIMO распознает движения множества объектов, а также оценивает расстояние от них и их направление. С помощью комплекса этих технологий робот может следить за перемещениями людей камерой, следовать за человеком или поприветствовать его, когда он приближается.
Распознавание поз и жестов
ASIMO умеет интерпретировать позиции и движения руки, распознавать позы и жесты. Благодаря чему робот может реагировать не только на голосовые команды, но и на естественные телодвижения людей. Таким образом он, например, понимает, когда ему предлагают рукопожатие или когда человек ему машет, и отвечает взаимностью. Кроме того, он понимает, когда ему указывают направление движения.
Распознавание окружающей среды
ASIMO умеет анализировать окружающие объекты и ландшафт и действовать так, чтобы это было безопасно для него и находящихся рядом людей. Например, он узнает потенциально рискованные объекты, такие, как лестницы, а также останавливается или обходит людей и другие движущиеся объекты, чтобы не столкнуться с ними.
Распознавание звуков
Возможности робота распознавать род звуков углубились, и теперь он знает разницу между голосами и прочими звуками. Он отвечает на свое имя, поворачивается лицом к человеку, с которым разговаривает, реагирует на внезапные необычные звуки вроде упавшего предмета или столкновения, и поворачивает голову в этом направлении.
Распознавание лиц
ASIMO может узнавать человеческие лица, даже когда человек двигается. Он может отдельно различать 10 человеческих лиц. Когда их зарегистрируют в его памяти, он будет обращаться к ним по имени.

Albert Hubo: робот-Эйнштейн

Робот Альберт Хубо (Albert HUBO) – андроидный робот. Его внешний вид составляет голова, которая копирует голову ученого Альберта Эйнштейна, и туловище довольно известного гуманоидного робота Хубо. Период разработки составил три месяца и завершился в ноябре 2005 года. Голова была разработана компанией Hanson-Robotics. Тело сделано из специфического материала, Frubber, который частенько используют в Голливуде.
Голова имеет 35 суставов, благодаря чему может выражать различные эмоции на лице, пользуясь независимыми движениями глаз и губ. Также в голове есть две CCD камеры для визуального распознавания. Кроме того, Альберт умеет вытворять все присущие Хубо представления, поэтому возможно выражать еще больше естественных человеческих движений и манер поведения. В теле спрятаны полимерные литиевые батареи, которые обеспечивают около двух с половиной часов автономной работы робота.
С помощью удаленной сети роботом Альбертом можно управлять из внешнего компьютера. Впервые Альберт Хумо был представлен в 2005 году на саммите АПЕК в Пусане (Корея). Его похвалили многие мировые лидеры: президент США, премьер-министр Японии и т.п.

Stanley: самоуправляемое транспортное средство
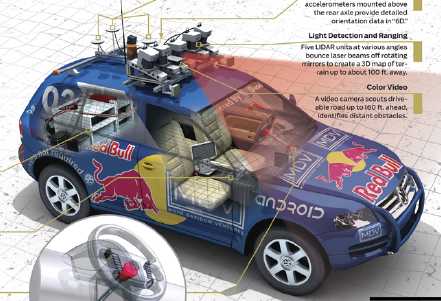
Стэнли (Stanley) – это автономное средство передвижения, созданное гоночной командой Стэнфордского университета. Это обычный Фольксваген Туарег, доработанный до возможности управления только бортовыми компьютерами. Он принимал участие и победил в DARPA Grand Challenge в 2005 году и принес Стаэнфордской гоночной команде приз размером в два миллиона долларов, самый большой денежный приз за всю историю роботов.
Сенсоры, использованные в Стэнли, включают в себя пять лазерных лидаров, пару радаров, стереокамеру и однообъективную камеру. Обрабатывают информацию и определяют позицию машины GPS-приемник, GPS-компас, инерционная система управления, а информацию об одометрии колес получает внутренняя CAN шина Туарега. Компьютерная часть – это шесть мощных компьютеров Intel Pentium M с разными конфигурациями и операционными системами Линукс.
Стэнли наделена системой обнаружения приближающихся препятствий. Данные из лидаров скомбинированы с изображениями из визуальной системы, чтобы составить более полную картину обзора. Если приемлимую дорогу невозможно распознать хотя бы на ближайшие 40 метров, скорость снижается, а лидары ищут безопасный путь.
Кстати, вождение Стэнли программировали, пользуясь записью человеческого вождения в пустыне, а затем устанавливая точное значение каждому биту информации, создаваемой его системой сенсоров. После этой модификации машина-робот начала кататься со скоростью 45 миль в час по дорогам, пересеченным тенями деревьев. Пока точные значения для данных не были заданы, машина испуганно сворачивала с дороги, уверенная, что путь пересечен не тенями, а ямами.

BigDog: робот-мул
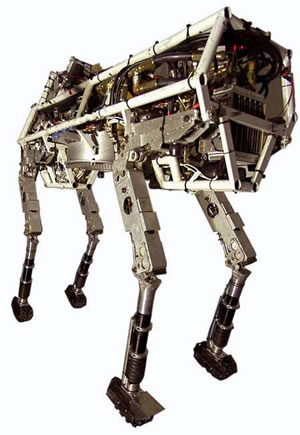
БогДог (BigDog, буквально – Большой Пес) – это четвероногий робот, созданный компанией Boston Dynamics в 2005 году. Проект БигДог финансировало Агентство защиты передовых исследований в надежде, что это создание сможет служить роботом-мулом для солдат на слишком грубой для транспорта местности.
БигДог весит 75 килограммов, он метровый в длину, а в высоты – 0, 7 метра. На данный момент он может путешествовать по тяжелой для передвижения местности со скоростью 5,3 км/ч, нести вес в 54 килограмма и карабкаться по склонам наклоном в 35 градусов.

RiSE: карабкающийся робот

Райз (RiSE) – это маленький шестилапый робот, который забирается по вертикальным поверхностям: стенам, деревьям, заборам. На пятках Райза имеются когти, микрокогти или липкий материал, в зависимости от поверхности, по которой надо лазать. Робот меняет позы, чтобы приспособиться к наклону поверхности, а зафиксированный хвост помогает балансировать на крутых поверхностях. Малыш весит всего 2 килограмма, в длину составляет 0,25 метра, бегает со скоростью 0,3 м/с.
Каждая из шести лап робота оснащена двумя электромоторами. Бортовой компьютер управляет лапами, определяет способ коммуникации с землей и обсуживает разнообразные сенсоры. В том числе сенсор, рассчитывающий инертность, сенсор позиции сустава для каждой лапы, сенсор натяжения лап и датчик контакта ступней.
Будущие версии Райза будут использовать сухое прилипание, чтобы карабкаться по совершенно гладким отвесным поверхностям, таким как стекло и металл. Райз разработали совместно исследователи Пенсильванского университета, университетов Карнеги Меллон, Беркли, Стэнфорда, а также университета Льюиса и Кларка. Проект спонсировал Офис защиты науки DARPA.

QRIO: танцующий робот

QRIO ("Quest for cuRIOsity" – «Задача для любопытства») – это двуногий гуманоидный робот для развлечения, созданный и проданный Сони, чтобы не затухал успех их игрушки AIBO (робот-собачка). QRIO обладает ростом в 0,6 метра и весит 7,3 килограмма.
Робот умеет распознавать голоса и лица, благодаря чему может запоминать людей и их пристрастия и антипатии. Он умеет бегать со скоростью 23 см в секунду, что зафиксировано в Книге рекордов Гиннеса (2005 года) как первый, самый скоростной, двуногий робот, который бегает. Робот QRIO четвертого поколения работает от батареи час.
Четвертое поколение этих роботов умеет танцевать под Hell Yes, музыкальный клип исполнителя Beck. Эти экземпляры дополнены третьей камерой на лбу, и у них улучшили руки и запястья. Программисты работали три недели, чтобы обучить этих роботов хореографии.
Одной из новейших перспектив в современной науке является робототехника. Экраны телевизоров заполонили роботы, киборги и андроиды, которые зачастую представлены как агрессоры. Но так ли все обстоит в действительности?

1. Происхождение
Мало кто знает, но слово «робот» имеет славянские корни, так как произошло оно от чешского слова robota. Автором робота является Карел Чапек, который никогда не был исследователем. Впервые слово «робот» прозвучало в его пьесе «R.U.R.». в ней роботами именовались синтетические люди-слуги немеханической природы.

2. Андроиды
Впервые разработкой роботов, максимально схожих с людьми, занялся японец Хироси Исигуро. Именно он изобрел «геминоидов», отличавшихся реалистичной внешностью, плавной мимикой и голосом.
Японец мечтал разработать дистанционно управляемого робота, который был бы доступен для приобретения любому человеку. Неудивительно, что за такие идеи Исигуро пригласили консультантом в фантастический фильм «Суррогаты».
Однажды Исигуро решил проделать небольшой эксперимент и отправил своего андроида вместо себя читать лекцию. Но робота не пропустили на самолет, что очень расстроило изобретателя.

3. Зловещая долина
Японский исследователь Масахиро Мори решил заняться изучением страха перед человекоподобными роботами и в 1978 году ему удалось открыть эмпирический закон, который известен как «Страшная долина». Известно, что чем больше схожесть робота с человеком, тем больше он привлекателен для людей. А вот робот с изъянами не только отталкивает людей, но даже пугает их, так как напоминает им полуживого зомби.
Именно поэтому у разработчиков два выхода: либо делать высококачественных роботов, либо роботов, не похожих на людей.

4. Мягкие роботы
На сегодняшний день исследователи вплотную занялись разработкой мягких роботов. Примером тому могут служить роботы-гусеницы с мягкими частями тела. Вот только для того, чтобы максимально приблизить механизм к оригинальному, живому, необходимо время, а также множество необычных материалов, таких как пластик, резина и сплав с эффектом памяти.
5. Робофутбол
Постепенно роботы все больше начинают быть похожими на людей. Мало того, они даже начинают перенимать их хобби. Примером тому может послужить ассоциация робофутбола, цель которой при помощи команды роботов одержать победу над командой людей в 2050 году. Хотя до этого момента еще очень далеко, роботы проводят постоянные тренировки, за которыми очень интересно наблюдать. Двигаются игроки очень медленно, а также очень часто спотыкаются и падают. Все их действия вполне автономны, что уже можно считать крупным успехом.

6. Домашний робот
Компания Willow Garage наконец представила на суд зрителей свою последнюю разработку, которой стал двурукий домашний робот. Стоит такой помощник около 400 тысяч долларов. 11 представителей роботехники по итогам конкурса были отправлены в ведущие институты мира, где разработки для него стали открыты всем желающим. Теперь робот умеет не только открывать дверь и ездить в лифте, но и играть в бильярд и приносить пиво, чему его научили одаренные студенты. Особыми умениями выделился робот, программированием которого занимались в институте Беркли, Калифорния. За 25 минут он способен аккуратно свернуть и сложить полотенце.

7. Роботы в обществе
Не так давно компания «Робототехника без границ» представила аналог PR2, стоимостью в 35 тысяч долларов. Правда сделан этот робот из дешевых средств и у него одна рука, да и зачем он вообще необходим, до сих пор остается загадкой.

8. Программное обеспечение
Из-за быстрого развития робототехники, уже встает вопрос о развитии программного обеспечения для роботов. Существуют специальные операционные системы для роботов ROS, Urbi, NAO OS, основанные на Linux. Многие из них включают в себя модули зрения, речи и взаимодействия с механикой робота. Также уже можно встретить специальные приложения для роботов.

9. Бизнес
В рынок роботов вкладывается все больше денежных средств. К примеру, глава компании Mail.Ru Дмитрий Гришин планирует инвестировать 25 миллионов долларов в робототехнические компании.

10. Роботы в России
В России робототехнике не уделяется должного внимания, хотя в Сколково и проводятся регулярно робототехнические выставки. Вот только сколковские разработки на них большая редкость, основные проекты представлены исключительно иностранными учеными.
Робот является автоматическим устройством. Он действует по заложенной в него программе. Робот сделан по подобию живого организма и получает информацию от сенсоров (датчиков). Впервые слово робот ввел в употребление чешский писатель Карел Чапек и его брат Йозеф в 1920 году для пьесы «Россумские универсальные роботы». Означает оно подневольный труд и происходит от чешского слова «robota» или «robot».
Ранее в переводе на русский язык оно звучало как «роботарь», но в наше время мы его уже практически не услышим.
Для чего нужны роботы?
Робот нужен для того, чтобы заменить человека в тяжелых производственных или опасных условиях. Робот работает по заложенной в него программе, на основе получения информации от внешних устройств – сенсоров или по другому датчиков. Фактически любой робот копирует живые организмы и органы чувств людей, животных. То есть использует принципы такой прикладной науки как бионика.
Могут работать автономно или управляться оператором, то есть человеком, который отдает команды. В промышленности обычно используются стационарные роботы, которые совсем не похожи на людей. Это различного вида
- станки
- производственные линии
- манипуляторы и прочее.
Роботы, похожие на людей, называются андроидами. Сейчас их больше используют как бытовые игрушки или как помощника по дому с очень ограниченным функционалом.
Какие бывают типы роботов:
Промышленные роботы
– выполняют различные производственные задачи. Всегда есть устройство управления – контроллер, может включать в себя манипулятор, сервопривод, различные сенсоры, пневмоцилиндры и многое другое. Все зависит от того, что делают на этом производстве. Например — склады, логистика здесь требуются конвейеры, штабелеры и т.д. Выполняют различные технологические операции, перемещение предметов, обработку материалов.

Медицинские роботы
– наиболее известный хирургический робот «Да Винчи». Он управляется несколькими операторами хирургами. При его помощи проводят высокоточные операции. По своей сути это управляемый манипулятор. Обычно медицинские роботы совсем не похожи на людей. Также есть роботы, которые выполняют отдельные функции, например, массаж или внутривенные инъекции, терапевтические функции и прочее. Для более точечных операций идет разработка нано-роботов. Они смогут вводиться внутрь человеческого организма.

Бытовые роботы
– облегчают жизнь человеку. Это роботы, выполняющие функции секретаря, уборки помещений, роботы животные. Например робот-собачка, способная выполнять некоторые команды, роботы-пылесосы и другие.
Робот, которые обеспечивают безопасность.
— широко используются силовыми структурами. Это системы контроля доступом, автоматические устройства пожаротушения. МЧС и полиция используют беспилотники-дроны, подводных роботов для предотвращения пожаров и глубоководных работ.
Боевые роботы
Являются как правило дистанционно управляемыми и предназначены для замены человека в особо опасных и боевых ситуациях. Это роботы-минеры, роботы-саперы, роботы разведчики. Автономные боевые роботы пока находятся в стадии разработки.
Роботы учёные
– постепенно начинают использоваться для научных исследований и разработок. Для них используют все более совершенные алгоритмы управления. Роботы уже в состоянии проводить научные эксперименты, опыты, анализировать различные процессы, делать прогнозы и выдвигать теории. Эти роботы могут работать без перерыва, у них нет амбиций, они не могут обманывать и утаивать информацию. Также роботы лишены субъективной оценки своей работы.
Робот учитель
– может выполнять многие задачи, которые выполняет современный учитель. Он может читать вслух, общаться на многих языках, выдавать задания. Но пока не может распознавать эмоции человека, думать, как человек. Такой робот-учитель лишен индивидуального подхода к учащимся. У него сложности с мотивацией учеников и управлением классом.
Мы видим что различных типов роботов достаточно много и тому что такое робот можно дать много определений. Но пока у всех роботов отсутствует эмоциональная составляющая, пока это только управляемые программируемые механизмы. Этот перечень роботов далеко не полный. Каждый тип роботов также подразделяется на множество видов. С каждым годом мир роботов становится все больше и разнообразнее.








