Когда-то давным-давно сделал из старого «винчестера» станочек для правки и заточки мелких свёрл, но у него слишком велика минимальная скорость вращения и обычно когда торопишься, то свёрла перегреваются. Пытался как-то уменьшать обороты, ничего хорошего не получилось и поэтому оставил всё как есть, просто заставив себя не торопиться. А тут недавно пришли знакомые компьютерщики и с вопросом «посмотри, из этого можно что-нибудь полезного сделать?» начали вываливать на стол множество дисководов на три с половиной дюйма (рис.1 ). И почему-то первой же мыслью было – а не попробовать ли собрать новую низкоскоростную «правку»…
Не откладывая это дело в долгий ящик, тут же снимаем крышки с нескольких дисководов разных марок и смотрим, что там внутри.
А внутри всё по-разному и у разных моделей одной марки управление двигателями может быть собрано и на одной и на двух микросхемах (рис.2 ).

Рассматриваем детали на платах поподробнее и отдаём предпочтение варианту с двумя микросхемами (рис.3 ) – по дорожкам и подходящим проводам видно, что правая микросхема ALPS-R SD705A (кроме всего прочего) отвечает за работу шагового двигателя перемещения считывающей головки, а левая LB11813 – только за работу двигателя вращения диска.

Также видно, что обе микросхемы соединяются всего двумя сигнальными дорожками – 33 и 34 выводы большой микросхемы идут к соединённым вместе 10-му и 11-тому выводам и к 12 выводу LB11813 соответственно.
Честно говоря, ранее уже приходилось сталкиваться с дисководами и уже есть некоторое представление о принципе их работы, поэтому, сказав для пущей важности «сейчас мы здесь что-нибудь отрежем…», аккуратно перерезал обе эти дорожки (рис.4 ).

Вывод 12 микросхемы LB11813 оставляем в покое, а на 10-й и 11-й нужно подать тактовый сигнал CLK. Так как частота его следования должна быть около 1 МГц, а амплитуда стандартная для микросхем пятивольтовой серии, то собираем на подвернувшемся под руку кусочке текстолита генератор прямоугольных импульсов на микросхеме К555ЛН1. Ставим переменный резистор для регулирования частоты и при среднем его положении подбором ёмкости конденсатора подгоняем выходную частоту к 1 МГц. Затем соединяем выход генератора с выводами LB11813 (рис.5 ), подпаиваем шины питания дисковода и генератора и включаем БП. Слышим, что двигатель начал вращаться. Это хорошо… Покрутив ручку переменного резистора, слышим как меняется частота вращения двигателя. И это хорошо…

Гости, радостные и окрылённые открывшимися перспективами, помчались домой, на ходу обдумывая, как можно использовать это «чудо техники», а я вернулся к схеме, чтобы посмотреть, что нужно оставить, а что убрать, и как это всё это облагородить в корпусе…
Сначала, вооружившись тестером, карандашом и листком бумаги, срисовал с платы схему (рис. 6 ). Здесь нумерация элементной обвязки, относящейся к микросхеме LB11813, оставлена старой, т.е. той, что была на плате.

Затем посмотрел некоторые технические характеристики. Потребляемый от пятивольтового блока питания ток на холостом ходу равен 0,22 А, при средней «нагрузке» на валу двигателя – меняется от 0,5 А до 0,7 А. Перед самой остановкой вращения ток достигает значения 0,85 А. Температура нагрева корпуса микросхемы LB11813 зависит от нагрузки, но в любом случае не превышает 50-70 градусов.
Минимальная частота генератора, при которой ещё вращается двигатель – около 0,45 МГц, максимальная – около 4,6 МГц.
Теперь дисковод полностью разбираю, оставив только две платы, соединённые 4-мя цветными проводами – по ним микросхема LB11813 управляет двигателем (рис.7 ). Белый восьмипроводный шлейф тоже не нужен – на плате с двигателем что было интересного, так это не то дроссель, не то какой другой элемент, но очень похожий на дроссель и отвечающий, скорее всего, за контроль частоты вращения двигателя (т.е. выполняющий функции датчика Холла) – так вот его можно выпаять, всё работает и без него. Остальные проводники шлейфа – это общий провод, напряжение питания, а также передача сигналов от концевых выключателей с платы двигателя (выпаиваем и их тоже).

«Сдуваю» термофеном все ненужные элементы с большой платы и обрезаю её так, чтобы остались крепёжные отверстия (рис.8 ).

Готового подходящего по размерам не нашёл, взял кусок 16-миллиметровой ДСП, тонкий пластмассовый лист и кусок стеклотекстолита от старой печатной платы. Немного попилил, посверлил и закрепил всё так, чтобы не очень «выпирало» и не занимало много места на столе (рис.9, рис.10, рис.11, рис.12 ).



Печатную плату для импульсного генератора развёл, но пока не вытравил – неохота разводить «бодягу» ради одной-двух маленьких плат. А пока установил в корпус макетный вариант и приклеил термоклеем его и плату с микросхемой-приводом двигателя. Файл печатной платы в формате программе находится в приложении к статье (вид сделан со стороны установки деталей - рисунок при надо «зеркалить»).
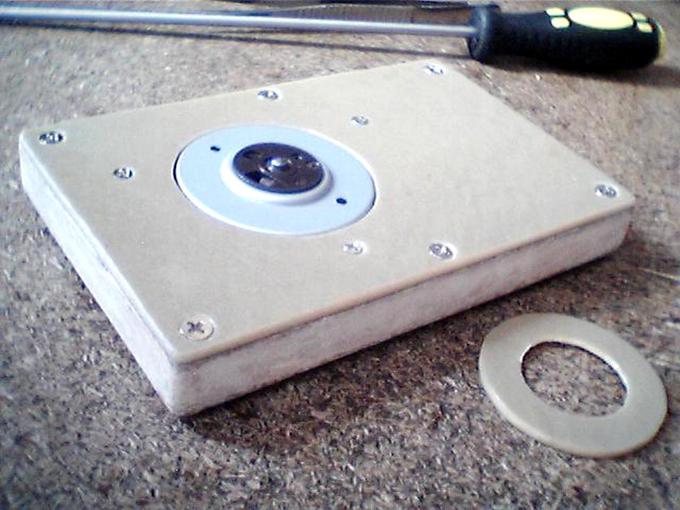
Никакой накладной декоративной панелью корпус сверху накрывать не стал – головки винтов так и оставил на виду. Пластмасса, из которой сделана верхняя крышка, попалась очень удачная – к ней не прилипают намертво никакие клеи из серий «Момент» или БФ и она практически не царапается и не мажется. Из той части, что осталась при выпиливания отверстия под вращающуюся поверхность двигателя, вырезал кольцо, которое приклеил сверху к этой вращающейся поверхности. На это кольцо можно наклеивать кольца из наждачной бумаги (рис.13 ), которые при желании достаточно легко содрать и на пластмассовой поверхности кольца почти не остаётся остатков клея. А что остаётся – сцарапывается ногтём.

В качестве блока питания применил импульсный преобразователь, выдающий 5В/1А от какой-то старой оргтехники. Провод питания впаян в схему напрямую – может быть это и не очень правильно, но зато блок питания никогда не теряется и потом, при его замене на новый, не приходится разбираться, где в разъёме «плюс, а где «минус»».
Никаких выключателей на корпусе нет, индикации подачи напряжения тоже. Движок резистора регулировки оборотов выведен сбоку. Учитывая, что за прошедший месяц пришлось два раза править свёрла и один раз затачивать несколько сломанных разного диаметра и за это время ни разу не появилось надобности уменьшить обороты, то получается, что можно было и не делать плавную регулировку. Настроить генератор на 4 МГц – и всё.
Конечно же, проверил работу схемы с двигателем от «винчестера» - всё работает так же, но с заметно меньшей мощностью в сравнении с управлением от «родного» контроллера. Это понятно - двигателю от HDD требуется более высокое напряжение питания.
Из академического интереса посмотрел форму сигналов в цепях питания двигателем. На рисунках ниже показаны состояния на «фазах» U и V относительно общего провода при тактовой частоте 4,6 МГц (рис.14 ), при 1 МГц (рис.15 ) и на одной из «фаз» и вывода, обозначенного на платах как N («нейтраль», надо полагать) (рис.16 ):



Сигналы «снимались» через резисторные делители, поэтому уровни не соответствуют показаниям шкалы напряжений, но так коэффициенты деления были одинаковы и не менялись, то отношения уровней относительно друг друга верны. Временные интервалы соответствуют действительности.
Андрей Гольцов, г. Искитим
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот | |
|---|---|---|---|---|---|---|---|
| Перечень дополнительных элементов | |||||||
| DD2 | Микросхема цифровая | К555ЛН1 | 1 | В блокнот | |||
| R1, R2 | Резистор | 470 Ом | 2 | ||||
Прикупив сей девайс, начал изучать. Наигравшись со светодиодами, датчиком температуры и LCD дисплеем, решил сделать что-то такое эдакое. Увидел на YouTube ролик про музыкальный дисковод, заинтересовался. Благо у меня этого добра (Floppy Drive`ов) полно на работе. Полазив по рунету и не обнаружив подробных мануалов как это можно реализовать, полез на буржуйские сайты и к своему счастью там и нашел подробное описание. И так начнем.
Необходимые ингредиенты:
Дисковод 3,5"" гибких дисков, у меня их 6 штук
Arduino Uno
BreadBoard, можно и без него, но с ним все же удобней
Блок питания от компьютера, подойдет любой
Мы сразу замыкаем 2 контакта зеленый
и черный
чтобы включить блок питания
Подключение флоппи к Arduino:
Полную распиновку флоппика давать не буду, ибо все есть в инете. Нам необходимы следующие пины:11 и 12 контакты дисковода замыкаем между собой с помощью джампера (Jumper).
17 и 19 контакты дисковода подводим к земле Arduino (GND).
18 контакт флоппа соединяем с 3 digital pin Arduino.
20 контакт флоппа соединяем со 2 digital pin Arduino.
Это что касается одного флоппика, с другими остальными 5-ю, как в моем случае, то повторяем процедуру так же. Единственное отличие, то что на 2 дисководе 18 контакт соединяем с 5 цифровым контактом Ардуины, а 20 с 4-м и так далее.
Ну и соответственно питаем 5В и GND сами дисководы.

Установка софта:
Качаем IDE для Ардуины, подключаем к компу, ставим драйвера.На данном этапе, перед заливкой скетча в Ардуину, необходимо скачать к себе библиотеку
TimerOne в то место где находится папка с ардуино, например: %arduino%\libraries\
Далее нам необходимо залить скетч в Arduino.
Далее после заливки кода в микроконтроллер и после того как все железо подключено, необходимо установить Java JDK и интегрированную среду разработки NetBeans .
После качаем java проект MoppyDesk - по сути эта прога и есть тот самый мозг, который заставляет через микроконтроллер производить звуки на флоппи дисководах.
Затем скачиваем драйвера для программы MoppyDesk. Так как у меня Windows 7, то я копировал файлы:
RXTXcomm.jar в
rxtxSerial.dll в
rxtxParallel.dll в
Открываем проект MoppyDesk в NetBeans и запускаем его, выбираем наш com порт (в диспетчере устройств можно посмотреть на какой порт установился Arduino), нажимаем кнопку Connect, далее необходимо выбрать midi файл, нажимаем Start и начинается дискотека. Так как у меня в серверной очень шумно, и дисководов почти не слышно, то я использовал микрофон, дабы усилить эффект.

Из дискет делали сумки, клали их как подставки под чашки, металлические сердцевинки магнитных дисков превращали в детали для админского бубна, а сами магнитные диски использовали вместо светофильтров, чтобы смотреть на солнце. О том, что у меня вышло, когда в моей голове встретилось искусство и гиковость и написано в этом посте.
Рисовать я люблю. Маркеров, ручек и карандашей у меня великое множество, и в какой-то момент я понял, что обычных подставок и пеналов, коих много в канцелярских магазинах, мне не хватит. Хотелось чего-то своего и подогнанного под свои нужды. Началось всё с того, как я прочитал пост на лайфхакере о подставке для ручек из дискет. Делается она очень просто - берется пять дискет и сцепляется кольцами друг к другу. Я усовершенствовал схему и не сцеплял их, а склеил. Сделанная по этому методу подставка была позднее модифицирована добавлением крышечки на скотче в коробочку для ластиков.


Одной подставки не хватило и я сделал ещё одну, заменив нижную дискету компакт-диском, это увеличило стабильность, да и выглядит это дело неплохо. Позднее я сделал ещё одну подставку по старому методу и склеил её с новой, дополнительно добавив внутрь несколько перегородок из таких же дискет. Уже два года верой и правдой она мне служит на столе.


Но и этого было недостаточно и тогда я стал делать ещё подставки. К компакт-диску добавился ещё один компакт-диск, что утолщало днище, делало его красивым снизу и ещё больше улучшало стабильность. Между дисками клалась бумажка, чтобы ничего не вываливалось в центре «блина». Для соединения подставок друг с другом часть диска спиливалась с обеих сторон. Дальше я стал сразу же спиливать угол диска и не использовать лишние дискеты для соединения двух подставок, и делал их сразу сцепленными, стенка между коробочками была общей на две. Перегородки были расчитаны на разные маркеры, от толстенных до тонких. Вот такой поезд теперь красуется у меня на столе.

Но ручек становилось всё больше и хотелось сделать ещё более удобную подставку. Достав специально купленную коробку дискет я решил сделать подставку, стоящую под углом. Методика была та же, что и в самый первый раз - коробка с днищем из дискеты или картонки (для оригинального вида), разделители из дискет, но сбоку были прицеплены ещё два диска, которые держат подставку под углом. В первый раз я использовал маленькие саморезы, но даже с ними успел намучатьсяя, во второй - приклеил их. Подставки получилась
невероятно удобными и занимают почетное место возле ноутбука.


Под углом чернила меньше портятся и доставать рисовательные палочки удобнее, к тому же сразу видно цвет или толщину.


Теперь я думаю, куда применить старые сидюки и дивидюки, коих у меня накопилось великое множество. Не уж-то сделать тот самый бубен?
Данная статья взята с зарубежного сайта и переведена мною лично. Предоставил эту статью .
Этот проект описывает конструкцию 3D принтера очень низкой бюджетной стоимости, который в основном построен из переработанных электронных компонентов.
Результатом является небольшой формат принтера менее чем за 100 $.
Прежде всего, мы узнаем, как работает общая система ЧПУ (по сборке и калибровке, подшипники, направляющие), а затем научим машину отвечать на инструкции G-кода. После этого, мы добавляем небольшой пластиковый экструдер и даем команды на пластиковую экструзию калибровки, настройки питания драйвера и других операций, которые дадут жизнь принтеру. После данной инструкции вы получите небольшой 3D принтер, который построен с приблизительно 80% переработанных компонентов, что дает его большой потенциал и помогает значительно снизить стоимость.
С одной стороны, вы получаете представление о машиностроении и цифровом изготовлении, а с другой стороны, вы получаете небольшой 3D принтер, построенный из повторно используемых электронных компонентов. Это должно помочь вам стать более опытным в решении проблем, связанных с утилизацией электронных отходов.
Шаг 1: X, Y и Z.
Необходимые компоненты:
- 2 стандартных CD / DVD дисковода от старого компьютера.
- 1 Floppy дисковод.
Мы можем получить эти компоненты даром, обратившись в сервисный центр ремонта. Мы хотим убедиться, что двигатели, которые мы используем от дисководов флоппи, являются шаговыми двигателями, а не двигатели постоянного тока.
Шаг 2: Подготовка моторчика

Компоненты:
3 шаговых двигателя от CD / DVD дисков.
1 NEMA 17 шаговый двигатель, что мы должны купить. Мы используем этот тип двигателя для пластикового экструдера, где нужны большие усилия, необходимые для работы с пластиковой нитью.
CNC электроника: ПЛАТФОРМЫ или RepRap Gen 6/7. Важно, мы можем использовать Sprinter / Marlin Open Firmware. В данном примере мы используем RepRap Gen6 электронику, но вы можете выбрать в зависимости от цены и доступности.
PC питания.
Кабели, розетка, термоусадочные трубки.
Первое, что мы хотим сделать, это как только у нас есть упомянутые шаговые двигатели, мы сможем припаять к ним провода. В этом случае у нас имеется 4 кабеля, для которых мы должны поддерживать соответствующую последовательность цветов (описано в паспорте).
Спецификация для шаговых двигателей CD / DVD: Скачать . .
Спецификация для NEMA 17 шагового двигателя: Скачать . .
Шаг 3: Подготовка источника питания

Следующий шаг заключается в подготовке питания для того, чтобы использовать его для нашего проекта. Прежде всего, мы соединяем два провода друг с другом (как указано на рисунке), чтобы было прямое питания с выключателем на подставку. После этого мы выбираем один желтый (12V) и один черный провод (GND) для питания контроллера.
Шаг 4: Проверка двигателей и программа Arduino IDE

Теперь мы собираемся проверить двигатели. Для этого нам нужно скачать Arduino IDE (физическая вычислительная среда), можно найти по адресу: http://arduino.cc/en/Main/Software .
Нам нужно, загрузить и установить версию Arduino 23.
После этого мы должны скачать прошивку. Мы выбрали Марлин (Marlin), который уже настроен и может быть загружен Marlin: Скачать . .
После того, как мы установили Arduino, мы подключим наш компьютер с ЧПУ контроллера Рампы / Sanguino / Gen6-7 с помощью кабеля USB, мы выберем соответствующий последовательный порт под Arduino инструментов IDE / последовательный порт, и мы будем выбирать тип контроллера под инструменты платы (Рампы (Arduino Mega 2560), Sanguinololu / Gen6 (Sanguino W / ATmega644P - Sanguino должен быть установлен внутри Arduino)).
Основное объяснение параметра, все параметры конфигурации находятся в configuration.h файла:
В среде Arduino мы откроем прошивку, у нас уже есть загруженный файл / Sketchbook / Marlin и мы увидим параметры конфигурации, перед тем, как загрузим прошивку на наш контроллер.
1) #define MOTHERBOARD 3, в соответствии с реальным оборудованием, мы используем (Рампы 1,3 или 1,4 = 33, Gen6 = 5, ...).
2) Термистор 7, RepRappro использует Honeywell 100k.
3) PID - это значение делает наш лазер более стабильным с точки зрения температуры.
4) Шаг на единицу, это очень важный момент для того, чтобы настроить любой контроллер (шаг 9)
Шаг 5: Принтер. Управление компьютером.

Управление принтером через компьютер.
Программное обеспечение: существуют различные, свободно доступные программы, которые позволяют нам взаимодействовать и управлять принтером (Pronterface, Repetier, ...) мы используем Repetier хост, который вы можете скачать с http://www.repetier.com/. Это простая установка и объединяет слои. Слайсер является частью программного обеспечения, которое генерирует последовательность разделов объекта, который мы хотим напечатать, связывает эти разделы со слоями и генерирует G-код для машины. Срезы можно настроить с помощью параметров, таких как: высота слоя, скорость печати, заполнения, и другие, которые имеют важное значение для качества печати.
Обычные конфигурации слайсера можно найти в следующих ссылках:
- Skeinforge конфигурация: http://fabmetheus.crsndoo.com/wiki/index.php/Skeinforge
- Конфигурация Slic3r: http://manual.slic3r.org/
В нашем случае мы имеем профиль configuret Skeinforge для принтера, которые можно интегрировать в принимающую пишущую головку программного обеспечения.
Шаг 6: Регулирование тока и интенсивность


Теперь мы готовы протестировать двигатели принтера. Подключите компьютер и контроллер машины с помощью кабеля USB (двигатели должны быть подключены к соответствующим гнездам). Запустите Repetier хостинг и активируйте связь между программным обеспечением и контроллером, выбрав соответствующий последовательный порт. Если соединение прошло успешно, вы сможете контролировать подключенные двигатели с использованием ручного управления справа.
Для того, чтобы избежать перегрева двигателей во время регулярного использования, мы будем регулировать силу тока, чтобы каждый двигатель мог получить равномерную нагрузку.
Для этого мы будем подключать только один двигатель. Мы будем повторять эту операцию для каждой оси. Для этого нам понадобится мультиметр, прикрепленный последовательно между источником питания и контроллером. Мультиметр должен быть установлен в режиме усилителя (текущего) - смотри рисунок.
Затем мы подключим контроллер к компьютеру снова, включите его и измерьте ток при помощи мультиметра. Когда мы вручную активировали двигатель через интерфейс Repetier, ток должен возрасти на определенное количество миллиампер (которые являются текущими для активации шагового двигателя). Для каждой оси ток немного отличается, в зависимости от шага двигателя. Вам придется настроить небольшой потенциометр на управление шагового интервала и установить текущее ограничение для каждой оси в соответствии со следующими контрольными значениями:
Плата проводит ток около 80 мА
Мы подадим ток на 200 мА для Х и Y-оси степперы.
400 мА для Z-оси, это требуется из-за большей мощности, чтобы поднять пишущую головку.
400 мА для питания двигателя экструдера, поскольку он является мощным потребителем тока.
Шаг 7: Создание машины структуры

В следующей ссылке вы найдете необходимые шаблоны для лазеров которые вырезают детали. Мы использовали толщиной 5 мм акриловые пластины, но можно использовать и другие материалы, как дерево, в зависимости от наличия и цены.
Лазерная настройка и примеры для программы Auto Cad: Скачать . .
Конструкция рамы дает возможность построить машину без клея: все части собраны с помощью механических соединений и винтов. Перед лазером вырезают части рамы, убедитесь, что двигатель хорошо закреплен в CD / DVD дисководе. Вам придется измерять и изменять отверстия в шаблоне САПР.
Шаг 8: Калибровка X, Y и оси Z
Хотя скачанная прошивка Marlin уже имеет стандартную калибровку для разрешения оси, вам придется пройти через этот шаг, если вы хотите точно настроить свой принтер. Здесь вам расскажут про микропрограммы которые позволяют задать шаг лазера вплоть до миллиметра, ваша машина на самом деле нуждается в этих точных настройках. Это значение зависит от шагов вашего двигателя и по размеру резьбы движущихся стержней ваших осей. Делая это, мы убедимся, что движение машины на самом деле соответствует расстояниям в G-кода.
Эти знания позволят вам построить CNC-машину самостоятельно в независимости от составных типов и размеров.
В этом случае, X, Y и Z имеют одинаковые резьбовые шпильки так калибровочные значения будут одинаковыми для них (некоторые могут отличаться, если вы используете разные компоненты для разных осей).
- Радиуса шкива.
- Шага на оборот нашего шагового двигателя.
Микро-шаговые параметры (в нашем случае 1/16, что означает, что за один такт сигнала, только 1/16 шага выполняется, давая более высокую точность в систему).
Мы устанавливаем это значение в прошивке (stepspermillimeter ).
Для оси Z:
Используя интерфейс Controller (Repetier) мы настраиваем ось Z, что позволяет двигаться на определенное расстояние и измерять реальное смещение.
В качестве примера, мы подадим команду, чтобы он двигался на 10 мм и измерим смещение 37.4 мм.
Существует N количество шагов, определенных в stepspermillimeter в прошивке (X = 80, Y = 80, Z = 2560, EXTR = 777,6).
N = N * 10 / 37,4
Новое значение должно быть 682,67.
Мы повторяем это в течение 3 или 4 раз, перекомпилируя и перезагружая прошивки для контроллера, мы получаем более высокую точность.
В этом проекте мы не использовали конечные установки для того, чтобы сделать более точным машину, но они могут быть легко включены в прошивку и она будет готова для нас.
Мы готовы к первому испытанию, мы можем использовать перо, чтобы проверить, что расстояния на чертеже верны.
Мы будем собирать прямой привод, как показано на рисунке, прикрепив шаговый двигатель к главной раме.
Для калибровки, поток пластика должен соответствовать кусочку пластиковой нити и расстоянию (например 100 мм), положить кусочек ленты. Затем перейдите к Repetier Software и нажмите выдавливать 100 мм, реальное расстояние и повторить Шаг 9 (операцию).
Шаг 10: Печатаем первый объект


Теперь аппарат должен быть готов для первого теста. Наш экструдер использует пластиковую нить диаметром 1.75 мм, которую легче выдавливать и более она более гибкая, чем стандартная диаметром 3 мм. Мы будем использовать PLA пластик, который является био-пластиком и имеет некоторое преимущество по сравнению с ABS: он плавится при более низкой температуре, что делает печать более легкой.
Теперь, в Repetier, мы активируем нарезки профилей, которые доступны для резки Skeinforge. Скачать .
Мы печатаем на принтере небольшой куб калибровки (10x10x10 мм), он будет печатать очень быстро, и мы сможем обнаружить проблемы конфигурации и моторный шаг потери, путем проверки фактического размера печатного куба.
Так, для начала печати, открыть модель STL и нарезать его, используя стандартный профиль (или тот, который вы скачали) с резки Skeinforge: мы увидим представление нарезанного объекта и соответствующий G-код. Мы подогреваем экструдер, и когда он нагреется до температуры плавления пластика (190-210C в зависимости от пластической марки) выдавим немного материала (пресс выдавливания), чтобы увидеть, что все работает должным образом.
Мы устанавливаем начало координат относительно экструзионной головки (х = 0, у = 0, z = 0) в качестве разделителя используем бумагу, головка должна быть как можно ближе к бумаге, но не касалась ее. Это будет исходное положение для экструзионной головки. Оттуда мы можем начать печать.








